近日,研究院李天龙青年科学家工作室在膀胱癌靶向联合治疗领域取得重要进展。研究团队构建了一种磁场-化学混合驱动的微机器人递送系统,实现了抗肿瘤药物紫杉醇(PTX)与免疫调节剂卡介苗(BCG)在膀胱肿瘤区域的精准递送、长效滞留和协同治疗,为提高膀胱癌灌注治疗的靶向性、药物利用率和抗肿瘤疗效提供了新的技术路径。相关研究成果以《Hybrid-Driven Bacillus Calmette–Guérin Carrier for Targeted Immuno-Chemo Combo Therapy in Bladder Cancer》为题,发表于Cyborg and Bionic Systems。
研究背景
膀胱癌是泌尿系统常见恶性肿瘤之一,临床上经尿道膀胱肿瘤切除术后仍存在较高复发风险,因此膀胱腔内灌注治疗和局部免疫调控策略在预防复发和抑制肿瘤进展方面具有重要意义。卡介苗灌注治疗是提升膀胱癌治疗效果的重要方向,但传统治疗方式仍面临药物靶向性差、滞留时间短以及副作用大等问题。
近年来,微纳机器人因具备优异的主动递送与复杂生物环境适应能力,在精准医学和肿瘤治疗中受到广泛关注。但现有研究主要集中于单一运动模式,且膀胱内滞留能力弱。如何同时实现精准导航、稳定滞留和免疫-化疗协同治疗,是膀胱癌微机器人治疗领域亟待解决的关键问题。
成果简介
针对膀胱癌腔内灌注治疗中靶向性不足、药物滞留时间短和联合治疗效率受限等问题,研究团队构建了一种磁场-化学混合驱动的载药卡介苗微机器人系统。该系统可实现紫杉醇(PTX)与卡介苗(BCG)在膀胱肿瘤区域的精准递送、局部富集和长效滞留,从而增强化疗与免疫治疗的协同抗肿瘤效果。
研究团队构建了集化学气泡推进、磁场导航、药物/免疫因子共负载和可穿戴磁固定一体化微机器人治疗平台。微机器人以镁微粒为核心,搭载了抗肿瘤药物紫杉醇、免疫制剂卡介苗以及四氧化三铁纳米颗粒。通过氢气微气泡提供自主推进能力,并借助外部磁场实现方向调控和三维导航;到达靶向区域后借助Halbatch阵列实现长时间驻停,并通过卡介苗和紫杉醇联合作用有效抑制肿瘤生长。
该技术为膀胱癌精准靶向治疗提供了一种新的微机器人递送方案,有望提高药物靶向能力、延长治疗作用时间、降低非靶向毒副作用,并增强免疫-化疗联合治疗效果。该研究不仅为膀胱癌复发防治提供了新的技术思路,也为面向复杂腔道器官的靶向药物递送、微机器人导航控制、局部免疫调控和可穿戴磁场辅助治疗系统的开发提供了重要参考。
图文导读
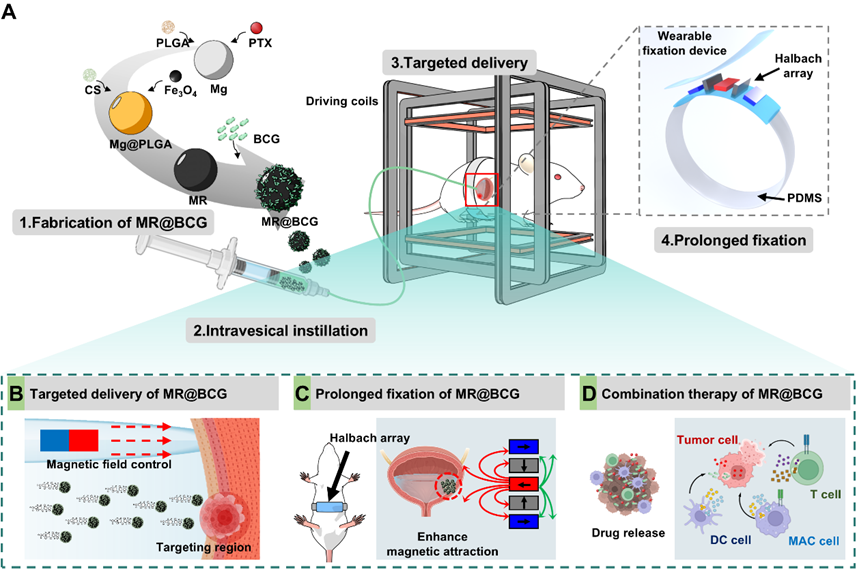
图1 磁场-化学混合驱动微机器人用于膀胱癌腔内治疗的机理
研究团队提出了一种用于膀胱癌靶向免疫-化疗的微机器人系统。微机器人由镁核心、PLGA 载药层、壳聚糖层、Fe3O4磁性纳米颗粒和表面负载的卡介苗组成。进入膀胱后,微机器人在磁场控制下向肿瘤区域定向导航,并借助 Halbach 阵列磁固定装置实现病灶处长效滞留。随后,紫杉醇逐步释放诱导肿瘤细胞凋亡,卡介苗进一步激活抗肿瘤免疫反应,实现化疗与免疫治疗的协同增强。
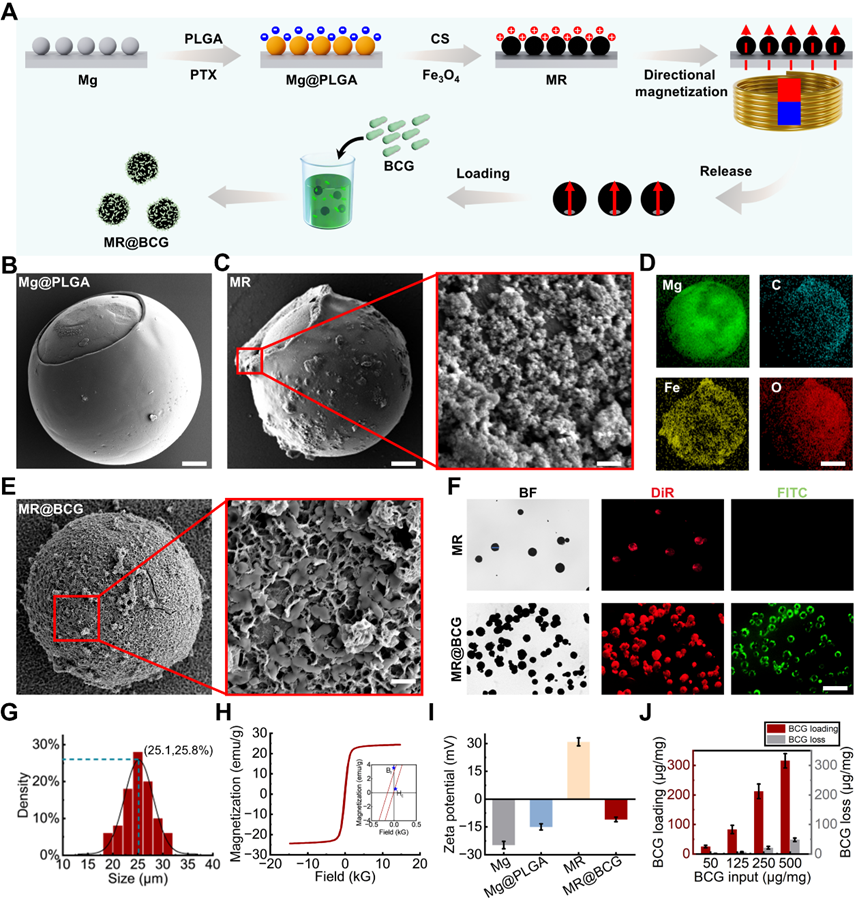
图2 MR@BCG 微机器人的制备与表征
研究团队采用层层自组装方法制备 MR@BCG 微机器人。扫描电镜、能谱分析、荧光成像和粒径统计结果表明,PLGA、壳聚糖、Fe3O4纳米颗粒和BCG均被成功装载到微机器人上,并表现出稳定的磁响应特性与Janus结构。Zeta电位变化进一步验证了BCG的成功负载。尿液稳定性测试显示,BCG在尿液环境中仍可较稳定地保持在微机器人表面。
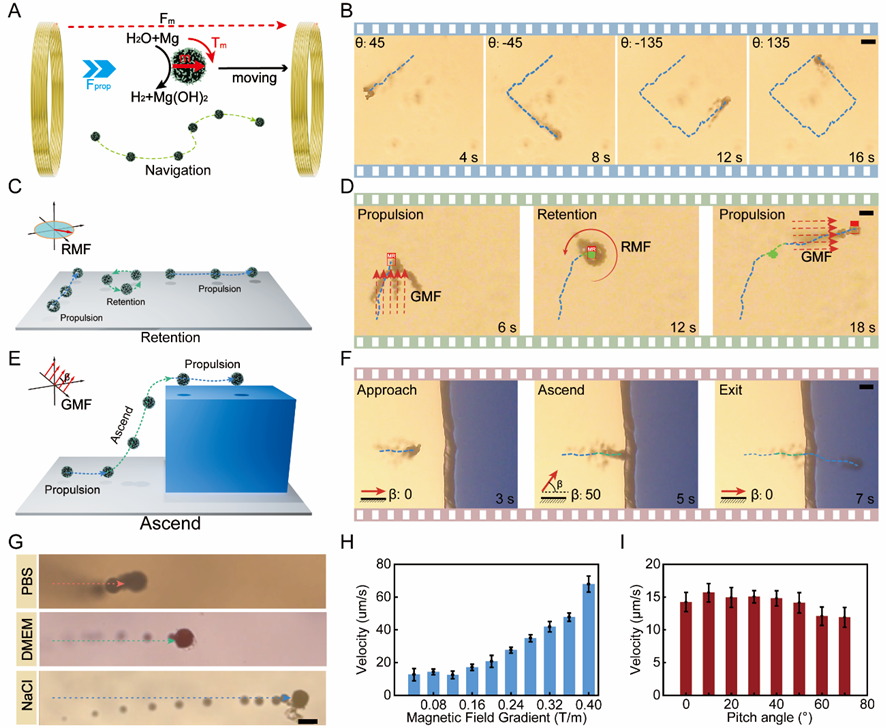
图3 微机器人的智能导航与三维运动能力
针对镁基微机器人气泡推进过程中方向和速度易受扰动的问题,研究团队构建了扩展状态观测器以预测随机的气泡推进力实现精准的运动控制。实验显示,微机器人能够沿轨迹实现精准运动,并可通过旋转磁场实现局部悬停和稳定滞留。同时,在具有俯仰角的梯度磁场作用下,微机器人能够克服重力并越过障碍,展现出面向复杂生物环境的三维运动潜力。
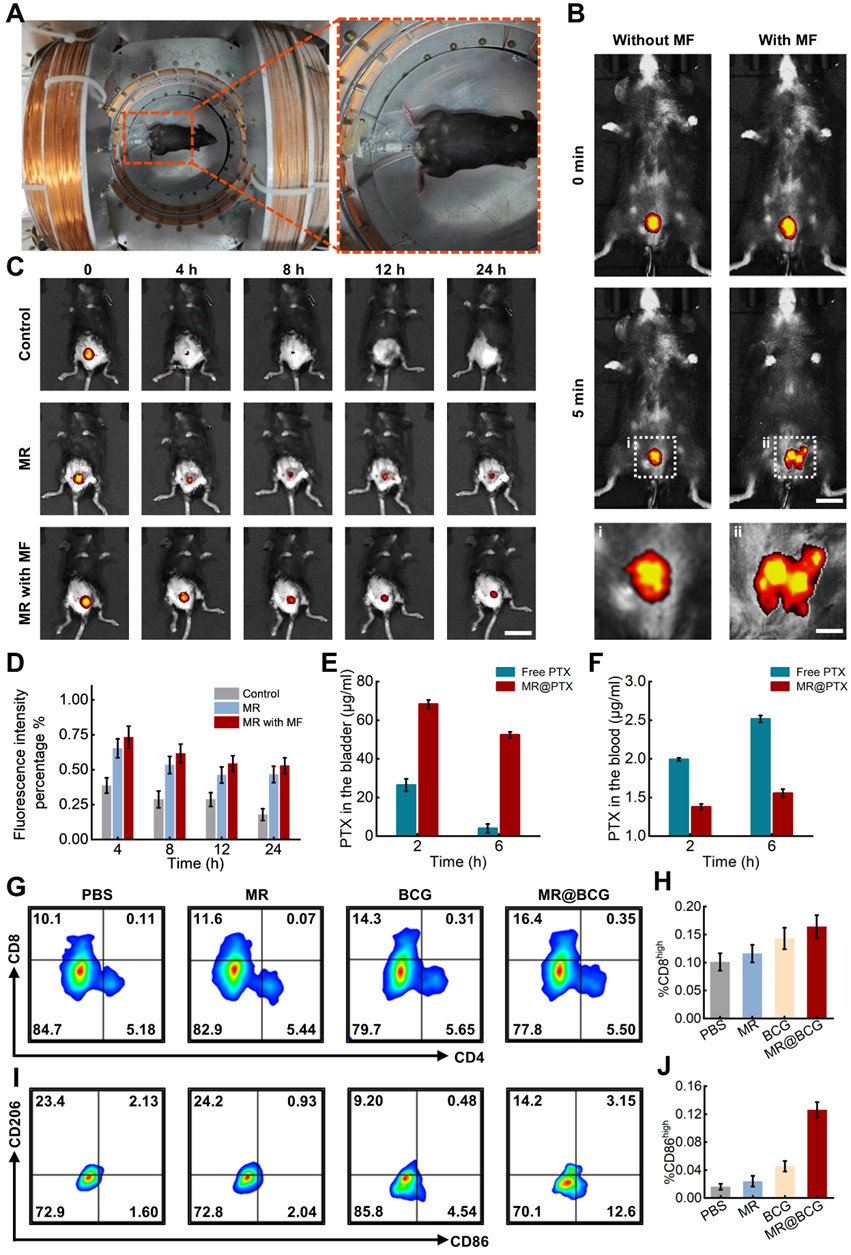
图4 微机器人群体在微通道和膀胱环境中的靶向聚集与磁固定
研究团队进一步验证了微机器人群体在小鼠体内的靶向运动与驻停能力。施加梯度磁场后,微机器人能够向目标区域定向迁移并聚集。基于Halbach阵列的柔性磁固定装置可在局部区域形成增强磁场,使微机器人在膀胱病灶区域保持更稳定的滞留,为延长局部药物作用时间提供了重要支撑。同时流式分析表明微机器人有效促进了小鼠膀胱病灶区域免疫细胞的激活。
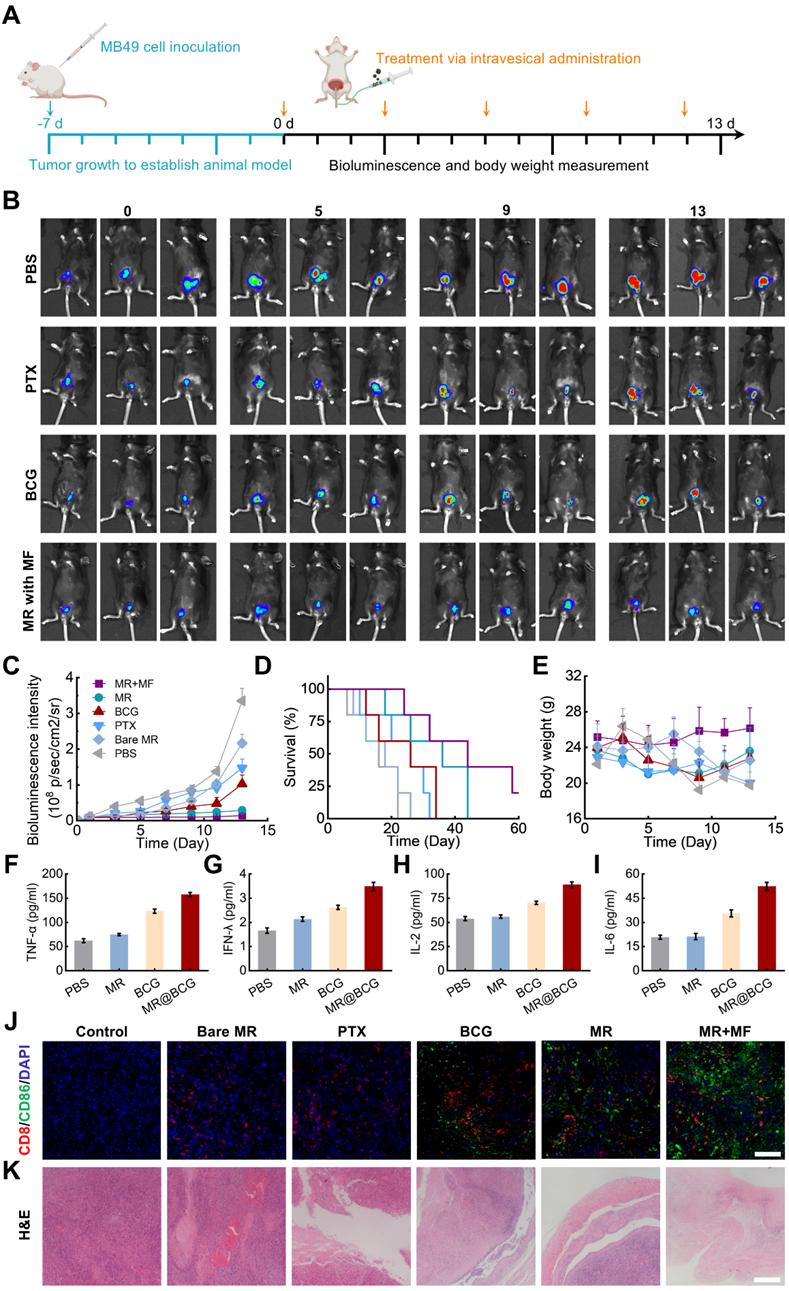
图5/图6 MR@BCG 在原位膀胱癌模型中的治疗效果
在小鼠原位膀胱癌模型中,研究团队系统评估了不同治疗组的抗肿瘤效果。结果表明,MR@BCG 结合磁场导航和固定策略能够显著抑制肿瘤细胞生长,增强膀胱局部免疫细胞浸润和细胞因子表达,并明显延长荷瘤小鼠生存时间。与传统游离药物或单一治疗方式相比,该系统在肿瘤抑制、局部免疫激活和安全性方面均表现出更优综合效果。
研究院李天龙教授、苏州大学范新建教授、东南大学王乾乾教授为论文共同通讯作者。该研究获得了国家自然科学基金、国家重点研发计划、中国黑龙江省自然科学基金、机器人与系统国家重点实验室及中央高校基本科研业务费专项的支持。
论文链接:https://spj.science.org/doi/full/10.34133/cbsystems.0492
文稿:王林,责任编辑:孙铭锌,审核:徐榕滨
