为服务国家战略需求、推动区域产业升级,研究院依托科研平台与人才资源,不断加快科技成果转化和企业孵化,已引进培育一批具备技术深度与发展潜力的项目公司。这些公司深耕前沿技术,面向实际需求,将科研成果不断转化为可落地、可规模化的产业方案。
产业化观察系列聚焦研究院重点孵化公司,呈现科研走向市场的真实路径,记录技术价值在产业一线的落地与实现。
苏州慧伟达智能科技有限公司
一、公司介绍
苏州慧伟达智能科技有限公司成立于2024年5月17日,注册资本200万元。公司依托哈工大飞行器机电一体化研究中心,拥有国家奖获得者、国家级人才、国家级青年人才、博士及工程师等。公司合作单位包括航天工业部门、 商业航天公司、高校、科研院所等。
二、资质荣誉
专利一:气悬浮系统的多气足过定位水平共面调节方法,(ZL201610901985.4)
专利二:航天器飞行过程中液体晃动造成干扰力的测量装置,(ZL202110387179.0)
专利三:主被动结合式悬吊零重力模拟系统和模拟方法,(ZL201711148473.6)
三、团队简介
齐乃明,哈工大教授,哈尔滨工业大学飞行器机电一体化团队负责人、中国宇航学会会员、中国宇航学会返回与再入专业委员会副主任、全国气体润滑专业委员会委员。完成或承担国家自然科学基金4项(含一项重点项目)、申请国家专利70余项、发表学术论文200余篇。相关技术获得国家技术发明二等奖、国防技术发明奖一等奖、国防科学技术奖三等奖、黑龙江省专利奖银奖等奖励、国防科学技术进步奖三等奖。
姚理,哈尔滨工业大学博士在读,主要研究方向自动控制,非标定制化智能设备以及项目管理,加工制造技术研究等。担任地面设备事业部主任期间负责大型结构件生产、液压油缸生产、电子束焊接及有色金属焊接等任务。担任智能装备研究所所长负责呼吸机,氧舱研制,车辆设计、转台设计及生产、谐波减速器设计及生产等工作。承担航天二院院级工艺攻关、院级质量与技术基础项目等课题多项,并获得厂级科技奖二等奖2项,三等奖2项。
王飞阳,哈尔滨工业大学博士在读,主要研究方向为机器视觉检测、3D视觉检测以及工业机器人应用。获得已授权发明专利9项,已授权实用新型4项,软件著作权4项,发表学术论文3篇。
赵博程,哈尔滨工业大学博士在读,航天学院航空宇航科学与技术专业,注册会计师全国统一考试专业阶段考试合格,首届空天前沿大会最佳论文奖 (AFC 2024), “航天三江杯”第八届中国研究生未来飞行器创新大赛一等奖。
周芮,哈尔滨工业大学博士毕业,哈尔滨工业大学航天学院航空宇航科学与技术专业,2018年起进行集群航天器地面模拟系统研制,完成双星伴飞,三星互瞄,七星编队等系列课题,具备机械设计、电控系统、算法编写全项目周期研发能力;科技创新方面,获中国国际飞行器设计挑战赛一等奖一项、第二届中国研究生机器人创新设计二等奖一项、人民网奖学金优秀技术课题奖一等奖一项二等奖两项、“挑战杯”大学生课外学术科技作品竞赛三等奖一项、祖光杯创意创新创业大赛银奖一项铜奖一项、卓育创新、搜狗、英飞凌杯等创新项目成果奖数项;发表学术论文5篇,获授权/受理专利14项。
四、业务布局
基于全自由度空间微低重力模拟试验技术,针对竖直方向运动自由度,设计开发主被动结合的竖向微低重力补偿机构,实现高精度、高保真的全自由度地面微低重力模拟试验,业务涵盖定制化微低重力模拟设备、系列高精度气浮元器件并进一步开发相关产线工位,布局工业自动化领域,本项目在技术及资源上具备显著优势,突破传统五自由度系统的技术瓶颈,首创主被动结合的竖向 微低重力补偿机构,客户涵盖航天工业部门、商业航天公司、高校、科研院所等。
五、核心产品
产品一:高精度强适应气浮单元产品
为发挥气悬浮技术在减小摩擦方面的优势,研制了多种气悬浮轴承。从运动形式上,包括单自由度(气悬浮转轴、气浮滑轨)、三自由度平动(气悬浮止推轴承)、三轴转动(气悬浮球轴承)。从材质上包括:金属气悬浮轴承、非金属气悬浮轴承。从技术形式上研发了小孔节流气悬浮轴承、金属与非金属多孔制气悬浮轴承。发明了气足共面自适应调节方法、力(位移)智能感知气足、多支撑高刚度平台拼接等多项核心技术,在气悬浮技术上形成了体系化的技术支撑。

径向、止推气悬浮轴承
由于气悬浮技术的高精度特性,可被广泛应用于三坐标机、高精度多轴加工床、光学测试台等工业高精密仪器。为某商业化卫星中心研制了一台三坐标机质测台,已投入使用。

商业化卫星AIT中心三坐标机
产品二:高保真多维度零重力航天模拟器系列产品
公司研发了系列化模块化的多功能多自由度零重力模拟器,具体包括三自由度、五自由度、六自由度模拟器,居于国内先进水平。五自由度模拟器采用自研高精度气浮球轴承,后续又发展为采用非金属多孔制气浮球轴承,发明的高精度重力配平技术能够将重力干扰力矩降低到3×10-3Nm。六自由度模拟器当中发明的正负刚度弹簧技术解决了铅垂方向高精度动态重力补偿的问题,并结合主动补偿将铅垂方向零重力模拟精度提高到5‰,成功应用于实际项目当中。
针对不同层次用户的需求,提供定制化、系列化、模块化的多自由度零重力模拟器,用户根据自身条件选择不同模块与功能。对于要求精度高、任务需求特殊的航天工业部门,提供整体定制服务;针对高校、商业航天公司等要求精度较低的用户,提供批量化生成的系列化产品;另外对于经费有限的用户还可提供产品租赁服务。

系列化气浮式航天器模拟器
高速旋转三轴姿态运动真空罐内模拟器
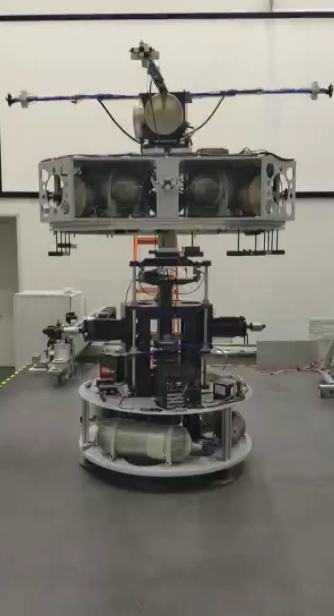
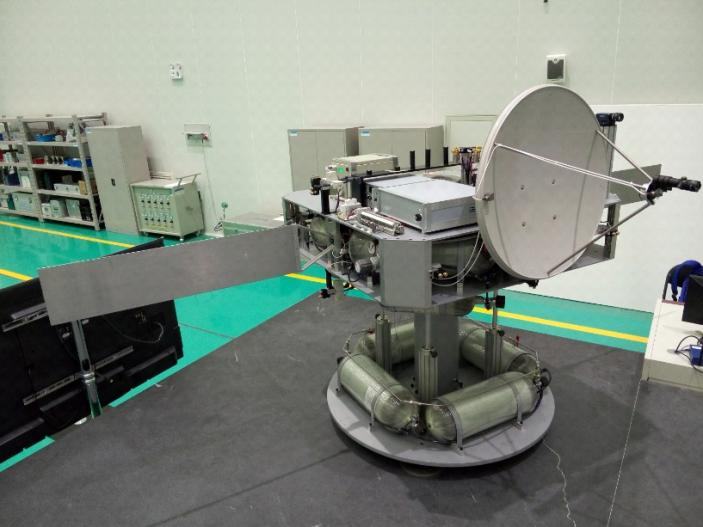
定制化模拟器系列产品
产品三:空间零重力装配与试验体系产品
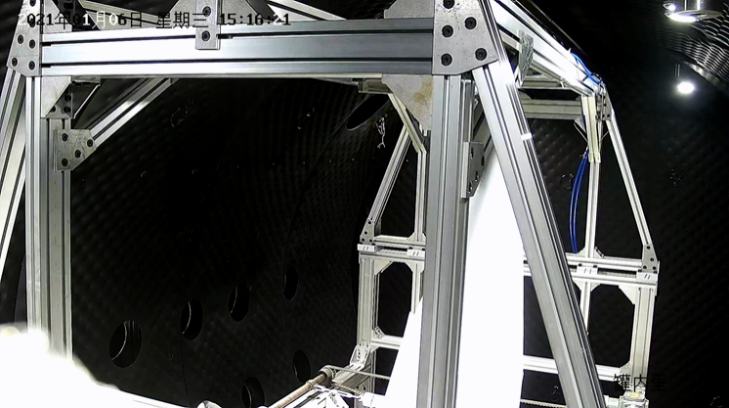
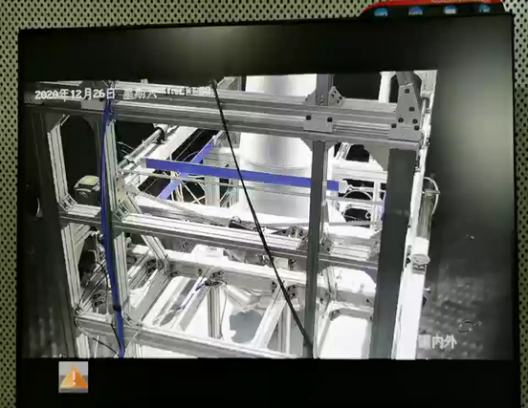
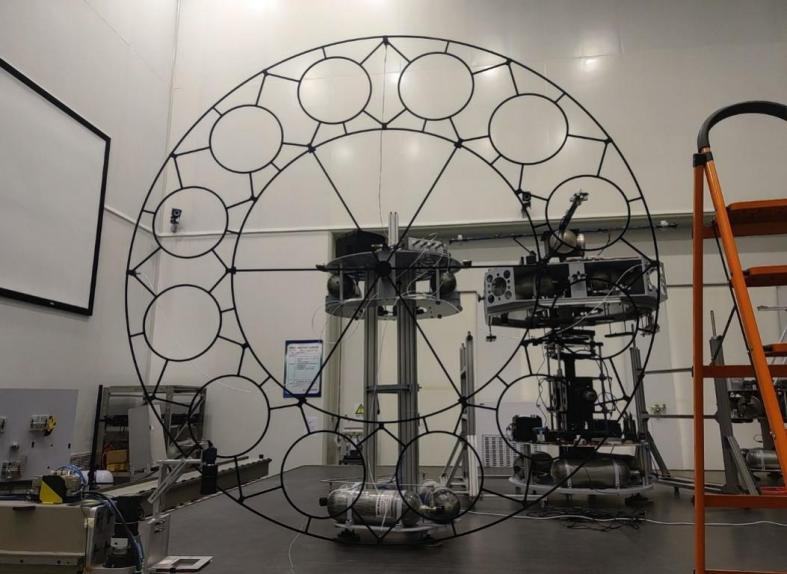
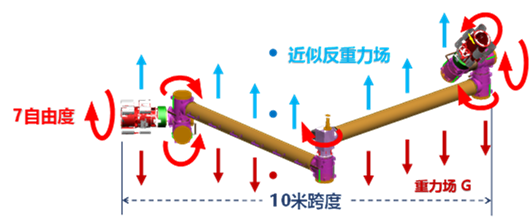
由多自由度气悬式航天器地面模拟器技术推广,国际上首次研制成功十米跨度、七自由度大型空间机械臂气浮式零重力装配与试验一体化系统。实现机械臂零重力装调和试验一体化,提高了试验精度和效率,保证了装配和试验状态的一致性、试验结果的高可信度,完成空间机械臂低应力装配和展开、爬行、转位、抓捕、对接等关键试验任务,综合性能指标、总体规模及气浮零重力模拟精度处于国际先进水平,为我国空间机械臂研发提供了重要条件保障和技术支撑。该项目被央视《大国重器》栏目报道,基于该项目的支持获2020年国家技术发明二等奖、2019年国防技术发明一等奖。


央视大国重器报道-大型空间机械臂气浮式零重力装配试验系统
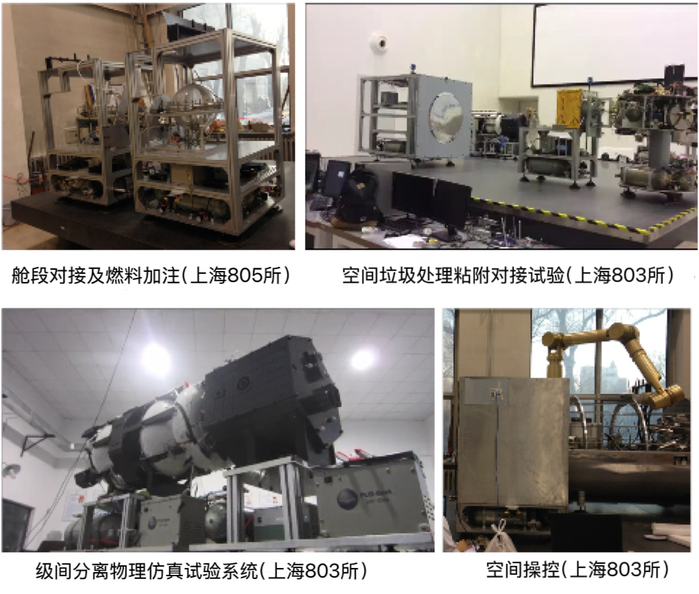
空间应用地面试验
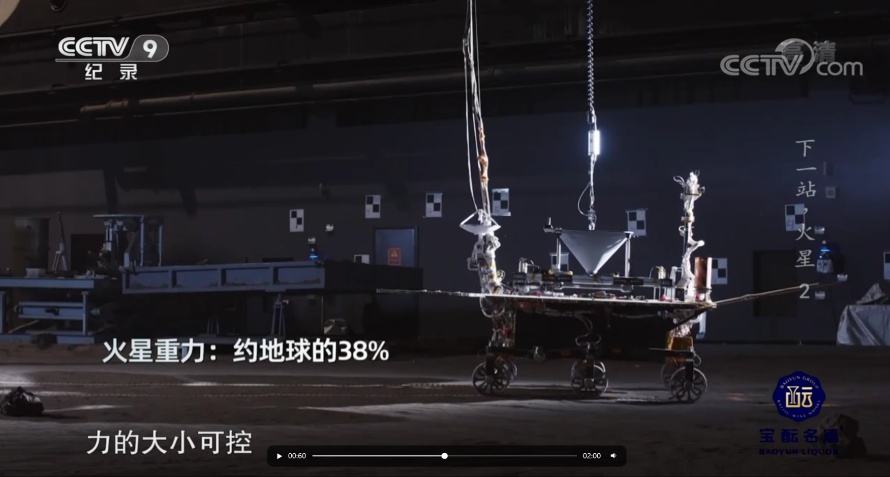
产品四:主被动悬吊式太空环境模拟系列产品

央视《下一站,火星》报道:搭建的火星模拟设备,有助提高遥操作火星车的可控性
CCTV《飞向月球》报道:利用地面模拟设备验证规划策略的可行性,将控制指令发布到月球车

央视报道:面向航天科普的微重力模拟系统

宇航员刘伯明亲身体验团队微重力模拟设备

央视“顶级实验室”报道:团队主动响应重力卸载系统
六、技术优势
优势一:项目公司在气浮技术方面深耕多年,目前是国内气悬浮元器件品种最齐全的研发、生产制造商。用于制造气悬浮元器件的材质丰富,相应技术较为完备;气浮产品种类丰富,包括从一维到三维;技术指标优秀,摩擦系数小于万分之一,直线精度优于0.1μm/m,回转精度优于1″。
优势二:项目采用高精度强适应气浮单元技术、高保真多维度零重力补偿技术、气浮式零重力装配与试验一体化系统关键技术,研发生产的产品有系列力/力矩传感器、磁性位移传感器、航天模拟器,达到的技术指标为力学测量精度万分之二以内、磁性位移测量精度最高3~5μm/m、模拟器实现六维模拟,整体技术处于国内顶尖水平。
优势三:研究中心近年来针对气悬浮技术、微低重力模拟技术、五自由度模拟器、六自由度模拟器、绳系飞行器捕获及回收、飞行器地面试验等方面开展了大量的研究,具有多年的相关技术的理论储备以及工程经验积累。围绕航天零重力模拟技术开展了核心技术创新:气浮核心组件、工业高精密仪器、多自由度模拟器、气浮式零重力装配与试验一体化体系。基于以上技术构建了专利群,申请专利60余项。并以该技术为支撑获2020年国家技术发明二等奖,获2019年国防技术发明一等奖一项,2015年黑龙江省技术发明一等奖一项。
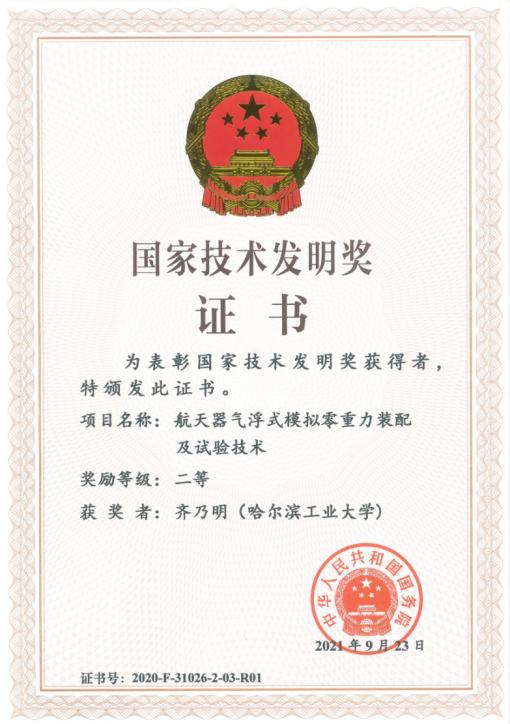
国家技术发明奖证书

国防技术发明奖证书
七、客户案例
某空间飞行器总体设计部——空间机械臂零重力装调、综合试验及检测系统
空间站机械臂是我国载人航天重大标志性工程,自由度多、状态千变万化,要在地面营造出近似反重力场,考核各种复杂的空间运动和指标,代替实际飞行试验,国际尚无先例。在零重力环境下,空间站机械臂的动态特性和运动模态,与地面重力环境下存在显著差异,其模拟精度严重影响机械臂的作业能力和安全。
国际上,空间机械臂零重力试验只能实现部分自由度上的重力补偿,难以实现全部关节的所有自由度的零重力模拟。针对该难题,提出了大尺度、多柔体的多维、分布式重力补偿理论及方法,建立了多维、多柔体动力学等效的重力补偿理论,保证了地面试验的有效性。国际上首次实现了7自由度10米跨度的空间站大型机械臂的全维度低应力装配及系统级高保真试验,有力保障了空间站机械臂工程型号的顺利实施。

八、合作方式
如希望进一步了解或探讨合作机会,欢迎联系企业洽谈对接:姚经理 13691181509。
从技术突破到产品落地,这些企业正在用实践回应产业命题,也为成果转化打开了更多可能。
产业化观察系列将持续关注研究院孵化企业的发展路径,展现科技成果走向应用的实践探索。未来,研究院将不断强化平台支撑作用,助力更多初创团队实现从技术构想到产业落地的有效转化。
